改寫1: 將BOX改成SPHERE
####################################程式開始##############################
from visual import *
#——————————————————————————
# 1. 參數設定
#——————————————————————————
v = 0.03 #木塊速度 = 0.03 m/s
dt = 0.001 #畫面更新的時間間隔,單位為s
t = 0 #模擬所經過的時間 ,單位為s,初始值為0
#——————————————————————————
# 2. 畫面設定
#——————————————————————————
scene = display(title=’1′, width=800, height=800, x=0, y=0, center=(0,0.06,0), background=(0.5,0.6,0.5))
floor = box(pos=(0,-(0.005)/2,0), length=0.3, height=0.005, width=0.1)
object = sphere(pos=(0, 0.05/2, 0), radius=0.05)
#——————————————————————————
# 3. 物體運動部分
#——————————————————————————
while(object.pos.x < 0.10):
rate(1000)
t += dt
object.pos.x += v*dt
print t
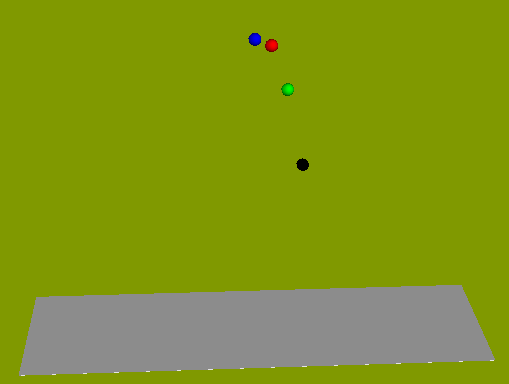
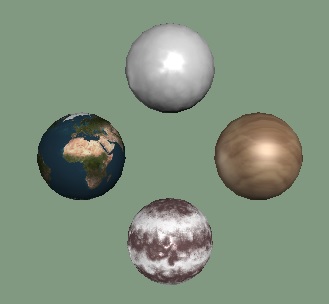
改寫2 四球爆炸
####################################程式開始###############################
from visual import *
#——————————————————————————
# 1. 參數設定
#——————————————————————————
v = 0.03 #木塊速度 = 0.03 m/s
dt = 0.001 #畫面更新的時間間隔,單位為s
t = 0 #模擬所經過的時間 ,單位為s,初始值為0
#——————————————————————————
# 2. 畫面設定
#——————————————————————————
scene = display(title=’1′, width=800, height=800, x=0, y=0, center=(0,0.06,0), background=(0.5,0.6,0.5))
# floor = box(pos=(0,-(0.005)/2,0), length=0.3, height=0.005, width=0.1)
object1 = sphere(pos=(0, 0.05/2, 0), radius=0.05, material=materials.wood)
object2 = sphere(pos=(0, 0.05/2, 0), radius=0.05, material=materials.earth)
object3 = sphere(pos=(0, 0.05/2, 0), radius=0.05, material=materials.rough)
object4 = sphere(pos=(0, 0.05/2, 0), radius=0.05, material=materials.marble)
#——————————————————————————
# 3. 物體運動部分
#——————————————————————————
while(object1.pos.x < 0.10):
rate(1000)
t += dt
object1.pos.x += v*dt
object2.pos.x += -v*dt
object3.pos.y += v*dt
object4.pos.y += -v*dt
print t
改寫3 四CONE爆炸
####################################程式開始##############################
from visual import *
#——————————————————————————
# 1. 參數設定
#——————————————————————————
v = 0.03 #木塊速度 = 0.03 m/s
dt = 0.001 #畫面更新的時間間隔,單位為s
t = 0 #模擬所經過的時間 ,單位為s,初始值為0
#——————————————————————————
# 2. 畫面設定
#——————————————————————————
scene = display(title=’1′, width=800, height=800, x=0, y=0, center=(0,0.06,0), background=(0.5,0.6,0.5))
object1 = cone(pos=(0, 0.05/2, 0), axis=(0.05,0,0), radius=0.05)
object2 = cone(pos=(0, 0.05/2, 0), axis=(-0.05,0,0), radius=0.05)
object3 = cone(pos=(0, 0.05/2, 0), axis=(0,0.05,0), radius=0.05)
object4 = cone(pos=(0, 0.05/2, 0), axis=(0,-0.05,0),radius=0.05)
#——————————————————————————
# 3. 物體運動部分
#——————————————————————————
while(object1.pos.x < 0.10):
rate(1000)
t += dt
object1.pos.x += v*dt
object2.pos.x += -v*dt
object3.pos.y += v*dt
object4.pos.y += -v*dt
print t